
Lingjun Zhao
About Me
Hi! I’m Lingjun Zhao, a second-year PhD student in Robotics at Georgia Institute of Technology, where I’m co-advised by Prof. Lu Gan and Prof. James Hays. I’m also affiliated with Daniel Guggenheim School of Aerospace Engineering. I’m broadly interested in Robot Perception, Planning and Control. My current research focuses on the intersection of Robotics and Computer Vision.
I obtained my master degree at University of Michigan’s Robotics Institute, supervised by Prof.Katie Skinner. I worked as a research assistant in UM Ford Center for Autnonomous Vehicles (FCAV), researching on robot perception for self-driving cars. Prior to joining the Master program, I completed my bachelor’s degree in Mechanical Engineering at Tianjin University, where I was advised by Prof. Fujun Wang and Prof. Le Song. During my undergraduate period, I worked on Soft Robot, Surgical Robot and Vision-based Tactile Sensor.
I will be joining Toyota Research Institute as a Research Intern in Summer 2026!
Research Interests
- 3D Vision for Robotics
- Physical Scene Understanding
- Multi-Modal Robot Learning
Research
-
 CVPR 2026 Findings
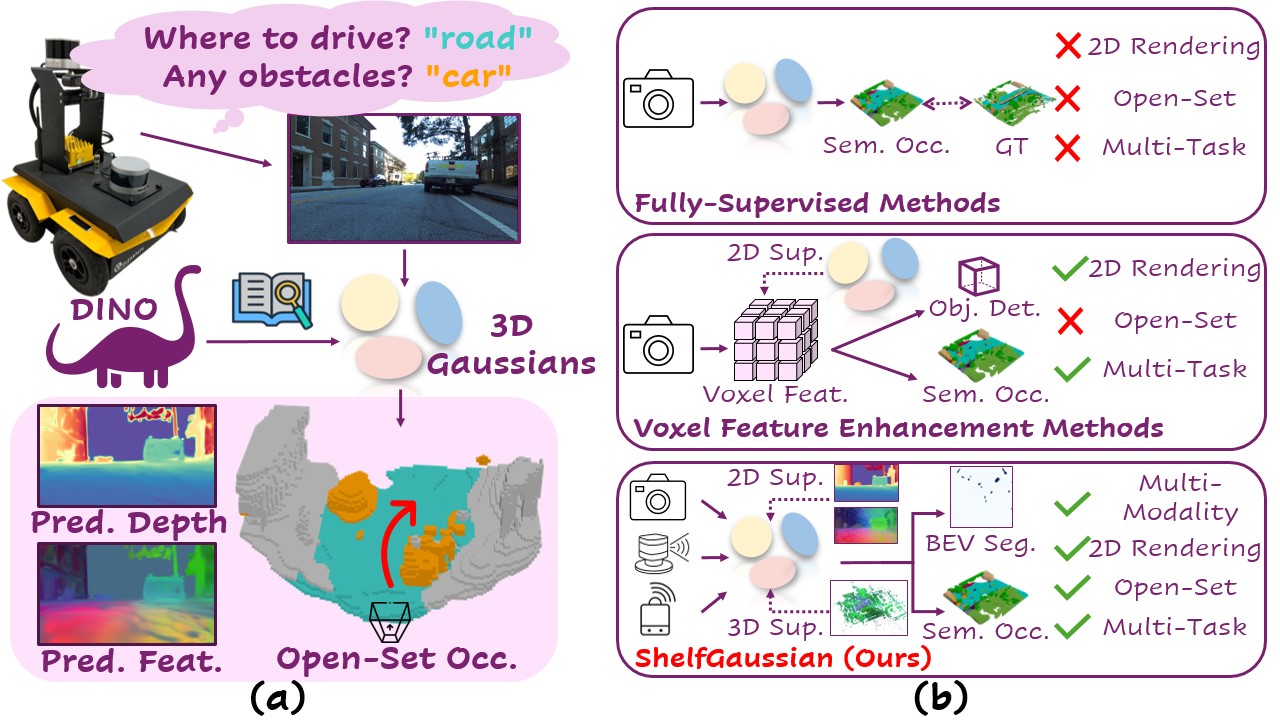
ShelfGaussian: Shelf-Supervised Open-Vocabulary Gaussian-based 3D Scene UnderstandingGeorgia Institute of Technology.
CVPR 2026 Findings
ShelfGaussian: Shelf-Supervised Open-Vocabulary Gaussian-based 3D Scene UnderstandingGeorgia Institute of Technology. -
 ICRA 2026
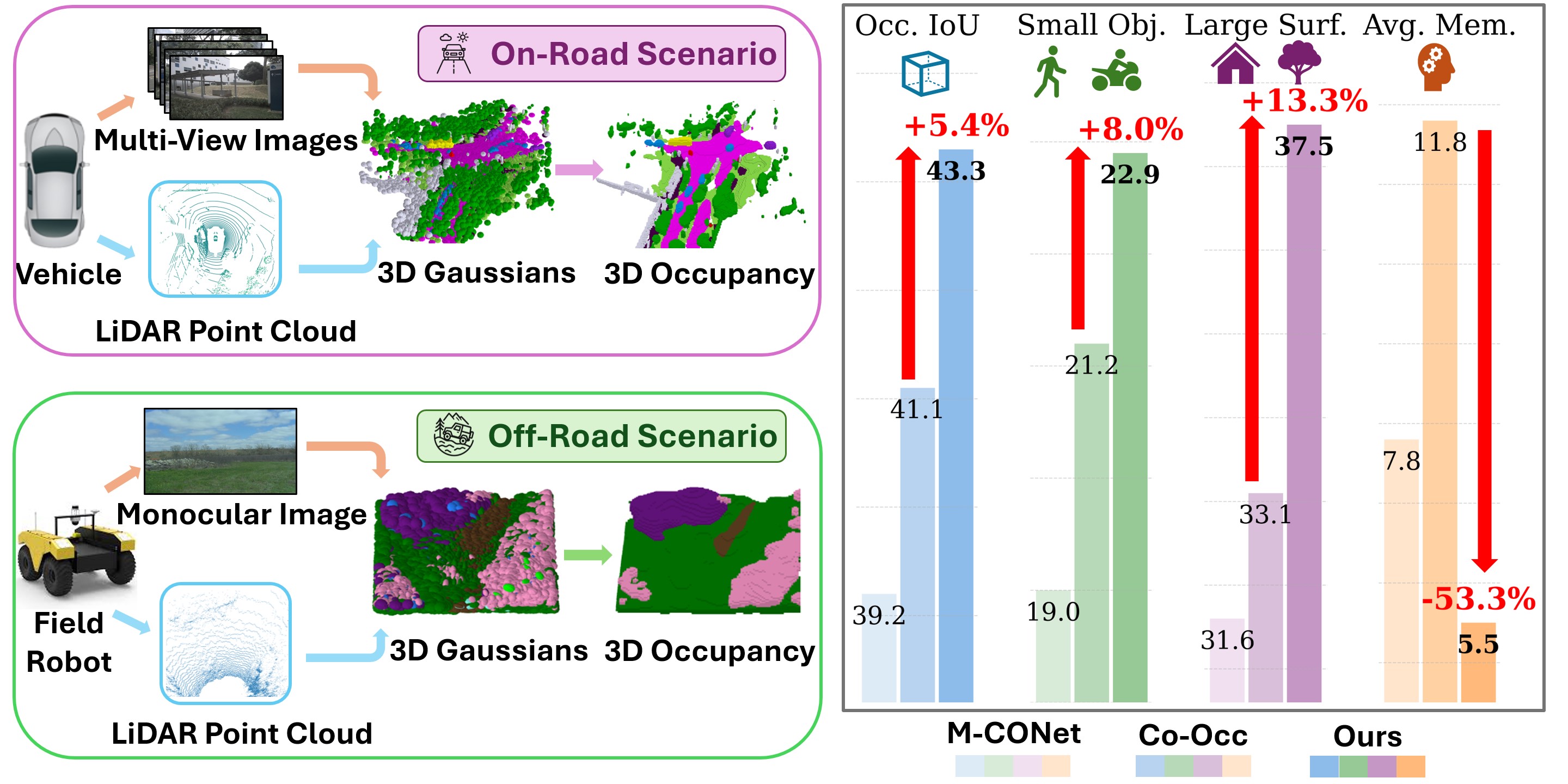
GaussianFormer3D: Multi-Modal Gaussian-based Semantic Occupancy Prediction with 3D Deformable AttentionGeorgia Institute of Technology.
ICRA 2026
GaussianFormer3D: Multi-Modal Gaussian-based Semantic Occupancy Prediction with 3D Deformable AttentionGeorgia Institute of Technology. -
 3DV 2026
3DV 2026
-
 CVPR 2024
CRKD: Enhanced Camera-Radar Object Detection with Cross-modality Knowledge DistillationFCAV, University of Michigan.
CVPR 2024
CRKD: Enhanced Camera-Radar Object Detection with Cross-modality Knowledge DistillationFCAV, University of Michigan. -
 ICRA 2024
LiRaFusion: Deep Adaptive LiDAR-Radar Fusion for 3D Object DetectionFCAV, University of Michigan.
ICRA 2024
LiRaFusion: Deep Adaptive LiDAR-Radar Fusion for 3D Object DetectionFCAV, University of Michigan. -
 IEEE Sensors Journal
IEEE Sensors Journal
Project
-
 ArmLab: Autnomous Control, Block Detection, and Path Planning for a 5-DOF Robotic Manipulator08/2022 ~ 10/2022, University of Michigan
ArmLab: Autnomous Control, Block Detection, and Path Planning for a 5-DOF Robotic Manipulator08/2022 ~ 10/2022, University of Michigan -
 BotLab: PID Control, SLAM and Exploration for a MBot10/2022 ~ 12/2022, University of Michigan
BotLab: PID Control, SLAM and Exploration for a MBot10/2022 ~ 12/2022, University of Michigan -
 Design and Manufacturing of Soft Manipulator with Compound Structure05/2020 ~ 05/2021, Tianjin University
Design and Manufacturing of Soft Manipulator with Compound Structure05/2020 ~ 05/2021, Tianjin University

Education
- [Aug. 2024 ~ ?] PhD in Robotics, Georgia Institute of Technology
- [Aug. 2022 ~ May. 2024] Master in Robotics, University of Michigan
- [Sep. 2018 ~ June. 2022] Bachelor in Mechanical Engineering, Tianjin University